

ROBOT dùng STM32 /arduino tự cân bằng được điều khiển từ xa được tạo ra từ các bộ phận in 3D . Chỉ với hai bánh xe, ROBOT có thể giữ thăng bằng mọi lúc bằng cách sử dụng các cảm biến bên trong và điều khiển động cơ. Bạn có thể điều khiển Robot của mình, khiến nó di chuyển hoặc xoay tròn, bằng cách gửi lệnh qua Điện thoại thông minh, Máy tính bảng trong khi nó vẫn giữ thăng bằng.
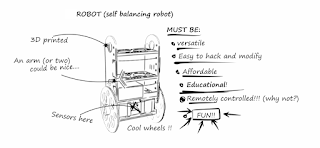
Ảnh : ý tưởng sáng tạo "bộ não" của Robot
Robot tự cân bằng này đọc các cảm biến quán tính (gia tốc kế và con quay hồi chuyển tích hợp trên chip MPU6000) 200 lần mỗi giây . Ta tính toán trạng thái của Robot (góc đối của Robot) và so sánh góc này với góc mục tiêu (0º nếu Nó muốn duy trì sự cân bằng mà không di chuyển, hoặc một góc dương hoặc âm nếu NÓ muốn tiến lên hoặc lùi lại). Sử dụng sự khác biệt giữa góc mục tiêu (giả sử là 0º) và góc thực tế (giả sử là 3º) ,Nó tính toán Hệ thống điều khiển để gửi các lệnh phù hợp đến các động cơ để duy trì thăng bằng. Các lệnh cho động cơ là gia tốc. Ví dụ: nếu rô bốt bị nghiêng về phía trước (góc của rô bốt là 3º) sau đó Nó gửi lệnh cho các động cơ tăng tốc về phía trước cho đến khi góc này giảm xuống 0 để bảo toàn sự cân bằng.
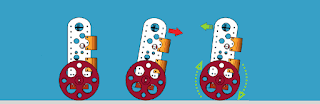
Vị trí ổn định nghiêng về phía trước Điều chỉnh độ nghiêng của nó bằng động cơ
Chiều sâu hơn một chút…
Vấn đề vật lý mà ROBOT giải quyết được gọi là Con lắc ngược. Đây là cơ chế tương tự bạn cần để giữ thăng bằng một chiếc ô trên tay. Điểm trục nằm dưới khối tâm của vật. Thông tin thêm về Con lắc ngược tại đây . Giải pháp toán học cho vấn đề này không dễ nhưng chúng ta không cần phải hiểu nó để giải quyết vấn đề cân bằng của robot của chúng ta. Những gì chúng ta cần biết là làm thế nào để khôi phục sự cân bằng của robot để chúng ta có thể triển khai Thuật toán điều khiển để giải quyết vấn đề.
Một hệ thống điều khiển là rất hữu ích trong việc Robotics (một tự động hóa công nghiệp). Về cơ bản, nó là mã nhận thông tin từ cảm biến và lệnh mục tiêu làm đầu vào và tạo ra tín hiệu đầu ra để điều khiển cơ cấu chấp hành Robot (động cơ trong ví dụ của chúng ta) nhằm điều chỉnh hệ thống. Chúng tôi đang sử dụng bộ điều khiển PID (Tỷ lệ + Đạo hàm + Tích phân). Loại điều khiển này có 3 hằng số để điều chỉnh kP , kD , kI .
Từ Wikipedia: “Bộ điều khiển PID tính toán giá trị 'lỗi' là hiệu số giữa [Đầu vào] đo được và điểm đặt mong muốn. Bộ điều khiển cố gắng giảm thiểu lỗi bằng cách điều chỉnh [một Đầu ra]. ”
Vì vậy, bạn cho PID biết cần đo gì (“Đầu vào”), nơi bạn muốn đo lường đó (“Điểm đặt”) và biến số bạn muốn điều chỉnh để điều đó xảy ra (“Đầu ra”.) PID sau đó điều chỉnh đầu ra cố gắng làm cho đầu vào bằng với điểm đặt.
Để tham khảo, một bồn chứa nước chúng ta muốn lấp đầy đến một mức, Đầu vào, Điểm đặt và Đầu ra sẽ là mức theo cảm biến mức nước, mực nước mong muốn và nước được bơm vào bồn .
k P là phần Tỷ lệ và là phần chính của điều khiển, phần này tỷ lệ với sai số. k D là phần Đạo hàm và được áp dụng cho đạo hàm của sai số. Phần này phụ thuộc vào động lực học của hệ thống (phụ thuộc vào rô bốt, động cơ có trọng lượng, hệ thống trơ…). Điều cuối cùng, k I được áp dụng cho tích phân của lỗi và được sử dụng để giảm sai số ổn định, nó giống như một phần cắt trên đầu ra cuối cùng (hãy nghĩ đến các nút cắt trên vô lăng xe RC để làm cho xe đi thẳng hoàn toàn , k i loại bỏ phần bù giữa mục tiêu yêu cầu và giá trị thực).
Thông tin thêm về bộ điều khiển PID tại đây .
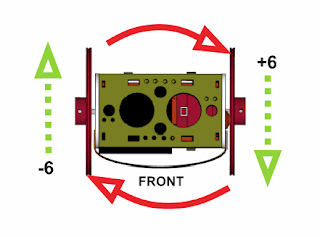
Trên ROBOT, lệnh lái từ người dùng được thêm vào đầu ra động cơ (một động cơ có dấu dương và động cơ còn lại có dấu âm). Ví dụ, nếu người dùng gửi lệnh lái 6 để quay sang phải ( từ -10 đến 10), chúng ta cần +6 vào giá trị động cơ bên trái và -6 cho động cơ bên phải . Nếu rô bốt không tiến hoặc lùi, kết quả của lệnh lái là rô bốt quay.
Tìm hiểu thêm về Hệ thống điều khiển…
Nhưng mọi thứ phức tạp hơn một chút… Chúng ta thực sự có hai bộ điều khiển PID trong một cấu hình tầng (đầu ra của một bộ điều khiển được kết nối với bộ điều khiển tiếp theo). Bộ điều khiển đầu ra là bộ điều khiển tốc độ và bộ điều khiển bên trong là bộ điều khiển ổn định.
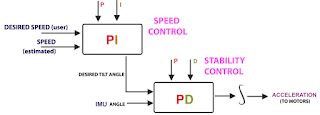
TRÊN: Vòng lặp thuật toán điều khiển ROBOT
Chúng ta chỉ có thể sử dụng một bộ điều khiển ổn định (cái thứ hai) nhưng điều này có nghĩa là đầu ra của bộ điều khiển sẽ là góc nghiêng rô bốt mong muốn, vì vậy người dùng sẽ điều khiển trực tiếp góc của rô bốt. Vấn đề là nếu trọng tâm không nằm hoàn toàn phía trên trục bánh xe, vì vậy robot cần một góc nghiêng nhỏ để giữ thăng bằng và nếu người dùng gửi lệnh nghiêng = 0 thì robot sẽ giữ thăng bằng trong khi di chuyển … Khi thêm bộ điều khiển thứ hai (bộ điều khiển tốc độ), hệ thống sẽ tự động bù cho điều này. Người dùng gửi lệnh đến tốc độ rô bốt = 0 và bộ điều khiển này sẽ gửi góc nghiêng “chính xác” tới bộ điều khiển thứ hai (bộ điều khiển ổn định) để giữ cho rô bốt được cân bằng và không di chuyển!
Câu hỏi thường gặp:
Tại sao bạn sử dụng Động cơ bước?
Có một số tùy chọn cho động cơ: DC, Brushless, Steppers… Chúng tôi chọn động cơ bước vì chúng có đủ mô-men xoắn, bạn có thể kết nối các bánh xe trực tiếp mà không cần bánh răng tạo ra một số phản ứng ngược (đây là vấn đề phổ biến ở robot cân bằng), chúng có vòng bi tốt và bạn sẽ có thể kiểm soát tốc độ của động cơ một cách chính xác. Ở kích thước tiêu chuẩn, những động cơ này rẻ (chúng tôi sử dụng cùng động cơ được sử dụng trên máy in 3D thông thường) và trình điều khiển cũng rẻ và dễ giao tiếp với MCU.
Tại sao sử dụng động cơ bước cho robot cân bằng?
Có một số tùy chọn cho động cơ, DC, Brushless, Steppers ... Chúng tôi chọn động cơ bước vì chúng có đủ mô-men xoắn, bạn có thể kết nối các bánh xe trực tiếp mà không cần bánh răng tạo ra một số phản ứng ngược, chúng có vòng bi tốt và bạn có thể kiểm soát tốc độ của động cơ rất đúng. Ngoài ra chúng cũng rẻ và các trình điều khiển quá…
Tải trọng bao nhiêu có thể mang ROBOT?
ROBOT có thể dễ dàng mang theo 1 vài vật nhỏ của bạn. Chúng tôi đã thử nghiệm thành công với tải trọng 400g. Trọng lượng nhiều hơn khiến robot không ổn định hơn nhưng điều này cũng có thể thú vị, phải không?
Tôi có thể sử dụng pin sạc lại được của pin Lipo không?
Có, bạn có thể sử dụng pin AA tiêu chuẩn (khuyến nghị kiềm), pin sạc AA (ví dụ: NiMh) hoặc bạn có thể tùy chọn sử dụng pin Lipo 3S. Chạy pin Lipo do bạn tự chịu trách nhiệm.
Thời gian chạy của ROBOT là gì?
Với pin AA có thể sạc lại (ví dụ: Ni-Mh 2100mAh), bạn có thể mong đợi khoảng nửa đến một giờ thời gian chạy
Hướng phát triển
Bạn đang suy nghĩ về việc tạo ra một robot tự dẫn đường bằng GPS? một phiên bản sửa đổi của ROBOT là robot của bạn!
Chuyển đổi thành robot tự động hoàn toàn với chướng ngại vật tránh được thêm SONAR, chuyển đổi thành robot theo dõi, v.v.
Ảnh : ý tưởng sáng tạo "bộ não" của Robot
Robot tự cân bằng này đọc các cảm biến quán tính (gia tốc kế và con quay hồi chuyển tích hợp trên chip MPU6000) 200 lần mỗi giây . Ta tính toán trạng thái của Robot (góc đối của Robot) và so sánh góc này với góc mục tiêu (0º nếu Nó muốn duy trì sự cân bằng mà không di chuyển, hoặc một góc dương hoặc âm nếu NÓ muốn tiến lên hoặc lùi lại). Sử dụng sự khác biệt giữa góc mục tiêu (giả sử là 0º) và góc thực tế (giả sử là 3º) ,Nó tính toán Hệ thống điều khiển để gửi các lệnh phù hợp đến các động cơ để duy trì thăng bằng. Các lệnh cho động cơ là gia tốc. Ví dụ: nếu rô bốt bị nghiêng về phía trước (góc của rô bốt là 3º) sau đó Nó gửi lệnh cho các động cơ tăng tốc về phía trước cho đến khi góc này giảm xuống 0 để bảo toàn sự cân bằng.
Vị trí ổn định nghiêng về phía trước Điều chỉnh độ nghiêng của nó bằng động cơ
Chiều sâu hơn một chút…
Vấn đề vật lý mà ROBOT giải quyết được gọi là Con lắc ngược. Đây là cơ chế tương tự bạn cần để giữ thăng bằng một chiếc ô trên tay. Điểm trục nằm dưới khối tâm của vật. Thông tin thêm về Con lắc ngược tại đây . Giải pháp toán học cho vấn đề này không dễ nhưng chúng ta không cần phải hiểu nó để giải quyết vấn đề cân bằng của robot của chúng ta. Những gì chúng ta cần biết là làm thế nào để khôi phục sự cân bằng của robot để chúng ta có thể triển khai Thuật toán điều khiển để giải quyết vấn đề.
Một hệ thống điều khiển là rất hữu ích trong việc Robotics (một tự động hóa công nghiệp). Về cơ bản, nó là mã nhận thông tin từ cảm biến và lệnh mục tiêu làm đầu vào và tạo ra tín hiệu đầu ra để điều khiển cơ cấu chấp hành Robot (động cơ trong ví dụ của chúng ta) nhằm điều chỉnh hệ thống. Chúng tôi đang sử dụng bộ điều khiển PID (Tỷ lệ + Đạo hàm + Tích phân). Loại điều khiển này có 3 hằng số để điều chỉnh kP , kD , kI .
Từ Wikipedia: “Bộ điều khiển PID tính toán giá trị 'lỗi' là hiệu số giữa [Đầu vào] đo được và điểm đặt mong muốn. Bộ điều khiển cố gắng giảm thiểu lỗi bằng cách điều chỉnh [một Đầu ra]. ”
Vì vậy, bạn cho PID biết cần đo gì (“Đầu vào”), nơi bạn muốn đo lường đó (“Điểm đặt”) và biến số bạn muốn điều chỉnh để điều đó xảy ra (“Đầu ra”.) PID sau đó điều chỉnh đầu ra cố gắng làm cho đầu vào bằng với điểm đặt.
Để tham khảo, một bồn chứa nước chúng ta muốn lấp đầy đến một mức, Đầu vào, Điểm đặt và Đầu ra sẽ là mức theo cảm biến mức nước, mực nước mong muốn và nước được bơm vào bồn .
k P là phần Tỷ lệ và là phần chính của điều khiển, phần này tỷ lệ với sai số. k D là phần Đạo hàm và được áp dụng cho đạo hàm của sai số. Phần này phụ thuộc vào động lực học của hệ thống (phụ thuộc vào rô bốt, động cơ có trọng lượng, hệ thống trơ…). Điều cuối cùng, k I được áp dụng cho tích phân của lỗi và được sử dụng để giảm sai số ổn định, nó giống như một phần cắt trên đầu ra cuối cùng (hãy nghĩ đến các nút cắt trên vô lăng xe RC để làm cho xe đi thẳng hoàn toàn , k i loại bỏ phần bù giữa mục tiêu yêu cầu và giá trị thực).
Thông tin thêm về bộ điều khiển PID tại đây .
Trên ROBOT, lệnh lái từ người dùng được thêm vào đầu ra động cơ (một động cơ có dấu dương và động cơ còn lại có dấu âm). Ví dụ, nếu người dùng gửi lệnh lái 6 để quay sang phải ( từ -10 đến 10), chúng ta cần +6 vào giá trị động cơ bên trái và -6 cho động cơ bên phải . Nếu rô bốt không tiến hoặc lùi, kết quả của lệnh lái là rô bốt quay.
Tìm hiểu thêm về Hệ thống điều khiển…
Nhưng mọi thứ phức tạp hơn một chút… Chúng ta thực sự có hai bộ điều khiển PID trong một cấu hình tầng (đầu ra của một bộ điều khiển được kết nối với bộ điều khiển tiếp theo). Bộ điều khiển đầu ra là bộ điều khiển tốc độ và bộ điều khiển bên trong là bộ điều khiển ổn định.
TRÊN: Vòng lặp thuật toán điều khiển ROBOT
Chúng ta chỉ có thể sử dụng một bộ điều khiển ổn định (cái thứ hai) nhưng điều này có nghĩa là đầu ra của bộ điều khiển sẽ là góc nghiêng rô bốt mong muốn, vì vậy người dùng sẽ điều khiển trực tiếp góc của rô bốt. Vấn đề là nếu trọng tâm không nằm hoàn toàn phía trên trục bánh xe, vì vậy robot cần một góc nghiêng nhỏ để giữ thăng bằng và nếu người dùng gửi lệnh nghiêng = 0 thì robot sẽ giữ thăng bằng trong khi di chuyển … Khi thêm bộ điều khiển thứ hai (bộ điều khiển tốc độ), hệ thống sẽ tự động bù cho điều này. Người dùng gửi lệnh đến tốc độ rô bốt = 0 và bộ điều khiển này sẽ gửi góc nghiêng “chính xác” tới bộ điều khiển thứ hai (bộ điều khiển ổn định) để giữ cho rô bốt được cân bằng và không di chuyển!
Câu hỏi thường gặp:
Tại sao bạn sử dụng Động cơ bước?
Có một số tùy chọn cho động cơ: DC, Brushless, Steppers… Chúng tôi chọn động cơ bước vì chúng có đủ mô-men xoắn, bạn có thể kết nối các bánh xe trực tiếp mà không cần bánh răng tạo ra một số phản ứng ngược (đây là vấn đề phổ biến ở robot cân bằng), chúng có vòng bi tốt và bạn sẽ có thể kiểm soát tốc độ của động cơ một cách chính xác. Ở kích thước tiêu chuẩn, những động cơ này rẻ (chúng tôi sử dụng cùng động cơ được sử dụng trên máy in 3D thông thường) và trình điều khiển cũng rẻ và dễ giao tiếp với MCU.
Tại sao sử dụng động cơ bước cho robot cân bằng?
Có một số tùy chọn cho động cơ, DC, Brushless, Steppers ... Chúng tôi chọn động cơ bước vì chúng có đủ mô-men xoắn, bạn có thể kết nối các bánh xe trực tiếp mà không cần bánh răng tạo ra một số phản ứng ngược, chúng có vòng bi tốt và bạn có thể kiểm soát tốc độ của động cơ rất đúng. Ngoài ra chúng cũng rẻ và các trình điều khiển quá…
Tải trọng bao nhiêu có thể mang ROBOT?
ROBOT có thể dễ dàng mang theo 1 vài vật nhỏ của bạn. Chúng tôi đã thử nghiệm thành công với tải trọng 400g. Trọng lượng nhiều hơn khiến robot không ổn định hơn nhưng điều này cũng có thể thú vị, phải không?
Tôi có thể sử dụng pin sạc lại được của pin Lipo không?
Có, bạn có thể sử dụng pin AA tiêu chuẩn (khuyến nghị kiềm), pin sạc AA (ví dụ: NiMh) hoặc bạn có thể tùy chọn sử dụng pin Lipo 3S. Chạy pin Lipo do bạn tự chịu trách nhiệm.
Thời gian chạy của ROBOT là gì?
Với pin AA có thể sạc lại (ví dụ: Ni-Mh 2100mAh), bạn có thể mong đợi khoảng nửa đến một giờ thời gian chạy
Hướng phát triển
Bạn đang suy nghĩ về việc tạo ra một robot tự dẫn đường bằng GPS? một phiên bản sửa đổi của ROBOT là robot của bạn!
Chuyển đổi thành robot tự động hoàn toàn với chướng ngại vật tránh được thêm SONAR, chuyển đổi thành robot theo dõi, v.v.
» Lắp đặt Nhà thông minh với 3 phút
» TẠI SAO HỆ THỐNG NHÀ THÔNG MINH KHÔNG DÂY FIBARO ĐANG TRỞ TH
» Công nghệ Z wave trong hệ thống Smathome
» Công nghệ Z wave trong hệ thống Smathome
» Giá barrier tự động mới nhất 2021
» Lắp đặt barie tự động khu công nghiệp - barrier tự động
» Giá barie chắn đường tại Bà Rịa - Vũng Tàu
» Thanh nhôm barie giá chỉ 500.000 đồng